High-Performance Physics Engine
Physics_Engine
Introduction
Physics_Engine is a high-performance physics engine developed in C++ with OpenGL during my third year at Gaming Campus (GTech, Tech – Engine specialization), in a team of three developers.
The objective of this project was particularly ambitious:
- Build a realistic physics simulation
- Handle a very large number of dynamic entities
- Deliver a smooth and stable experience
- All within a strict one-week timeframe
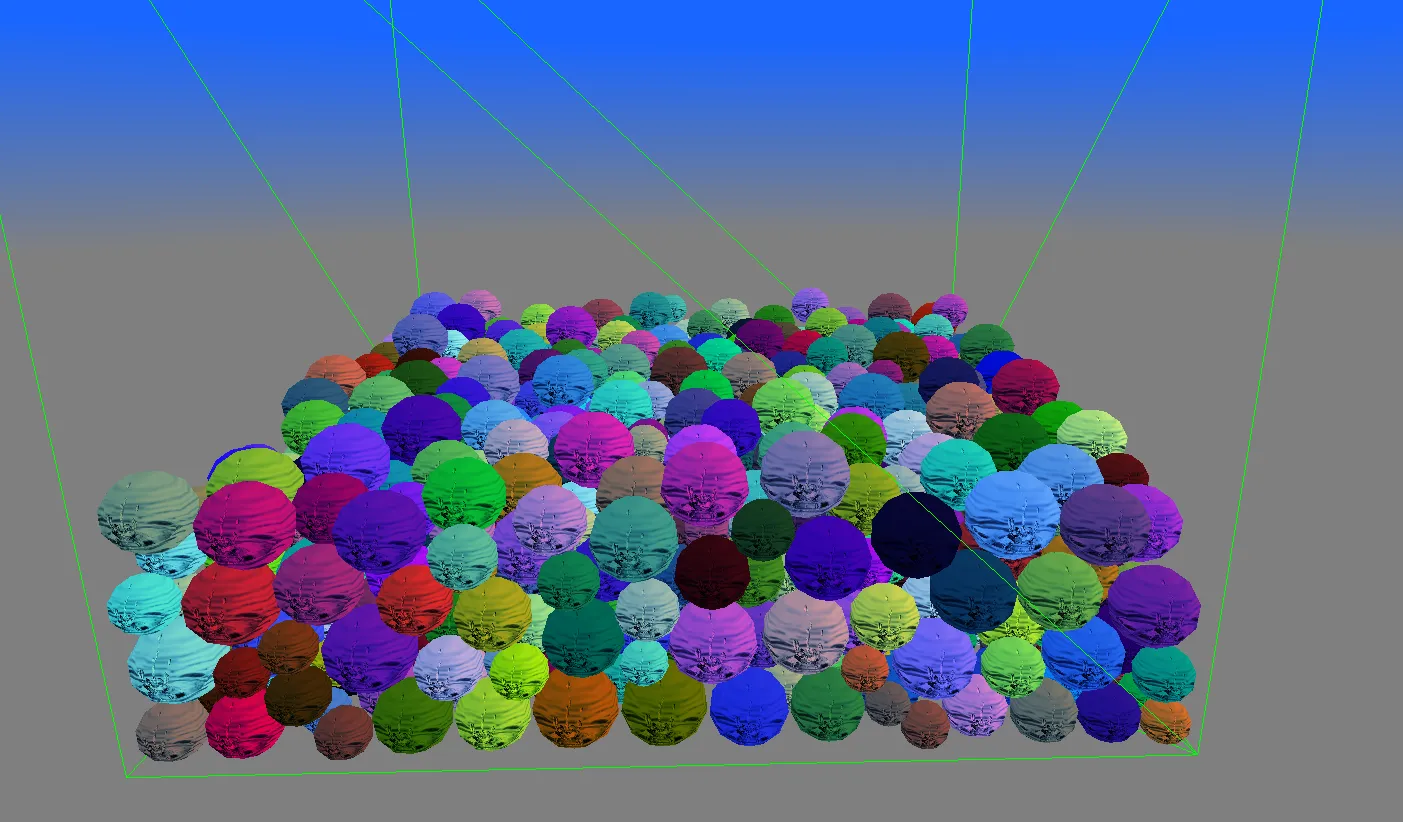
To validate the engine, we chose to simulate a ball pit scenario, pushing the system to handle thousands of interacting objects in real time.
Project Context & Constraints
At the beginning of the project, we faced several major constraints:
- A very short deadline (1 week)
- The need for real-time performance
- A requirement for physically coherent interactions
- A team-based workflow with fast iteration cycles
Our main goal quickly became clear:
Maximize the number of simulated entities while maintaining stable performance.
This led us to prioritize:
- Performance over feature completeness
- Efficient algorithms
- GPU acceleration wherever possible
Rendering & Simulation Setup
We used OpenGL for rendering due to its:
- Simplicity of integration
- Low-level control
- Good compatibility with GPU-based workflows
The simulation consisted of:
- Thousands of spherical rigid bodies
- Continuous gravity and collision interactions
- A confined environment mimicking a ball pool
Performance Results
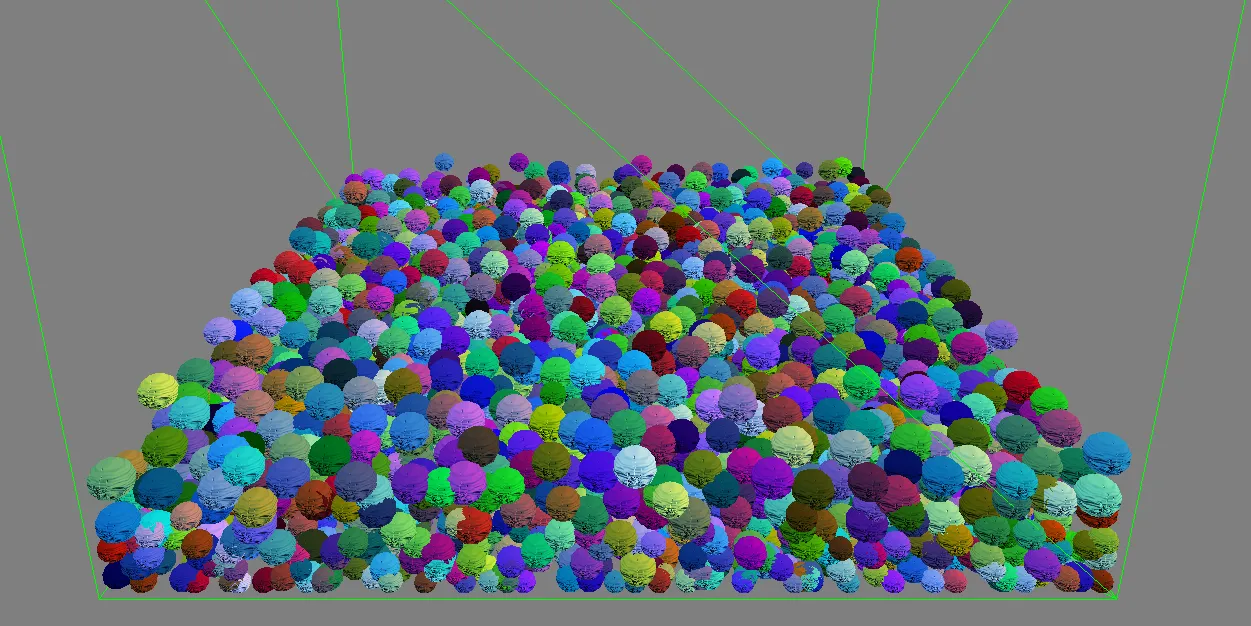
Thanks to our optimizations, we achieved:
- ~5000 simulated balls at ~30 FPS
- ~2000 balls at a stable 120 FPS (on my machine)
These results demonstrated:
- The scalability of our architecture
- The effectiveness of our GPU-based approach
Spatial Partitioning
One of the first major optimizations we implemented was spatial partitioning.
Instead of checking collisions between every pair of objects (which would be extremely costly), we:
- Divided space into logical regions
- Assigned entities to these regions
- Only tested collisions between nearby objects
This preprocessing step:
- Reduced the number of collision checks dramatically
- Improved overall performance significantly
- Made large-scale simulation feasible
GPU-Based Physics & Collision
The most impactful optimization was moving both:
- Collision detection
- Physics resolution
…entirely onto the GPU.
By doing so, we:
- Leveraged massive parallelism
- Avoided CPU bottlenecks
- Drastically increased the number of manageable entities
This approach required:
- Careful data structuring
- Efficient buffer transfers
- A strong understanding of parallel computation constraints
It was a key factor in reaching our performance targets.
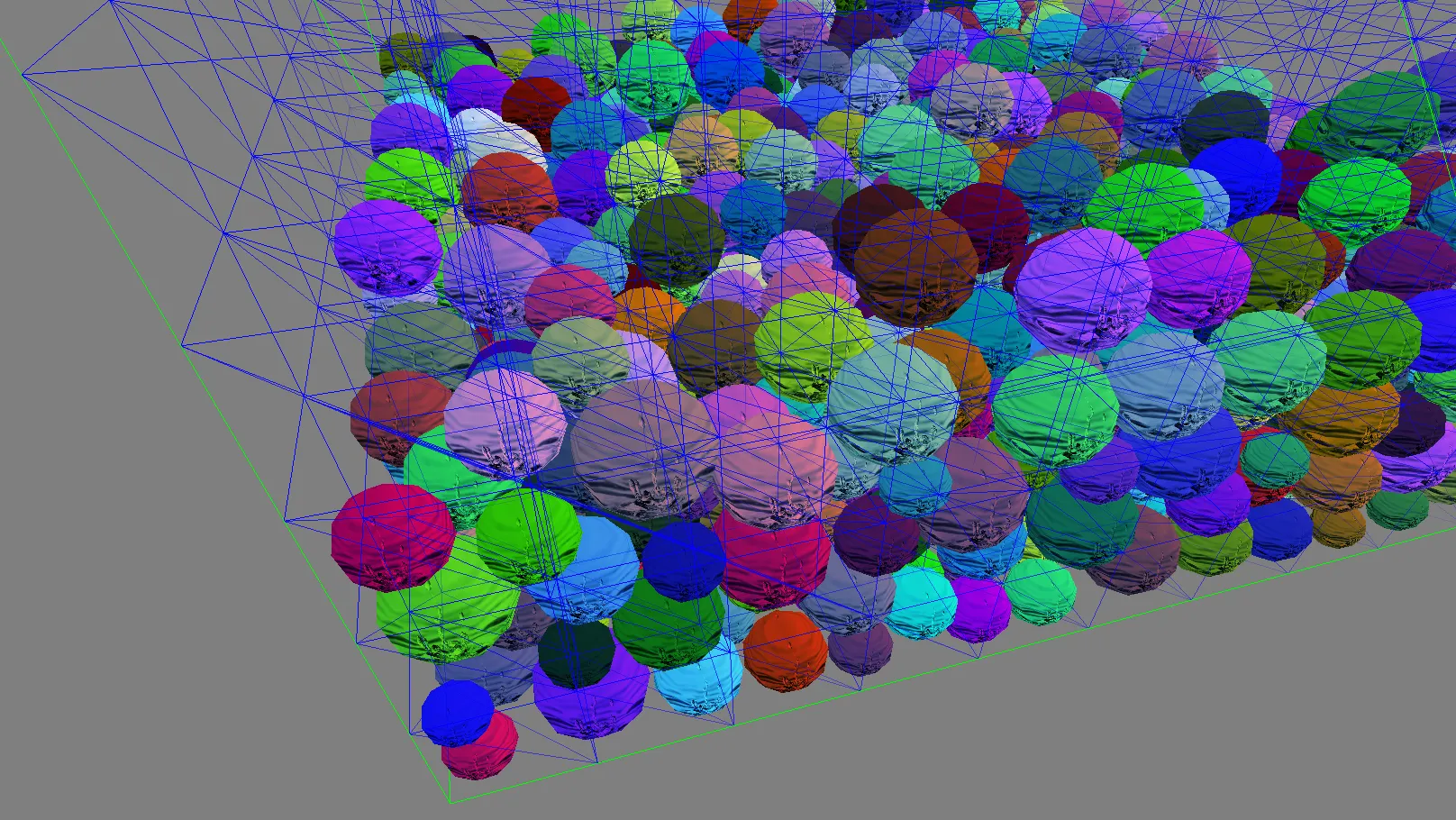
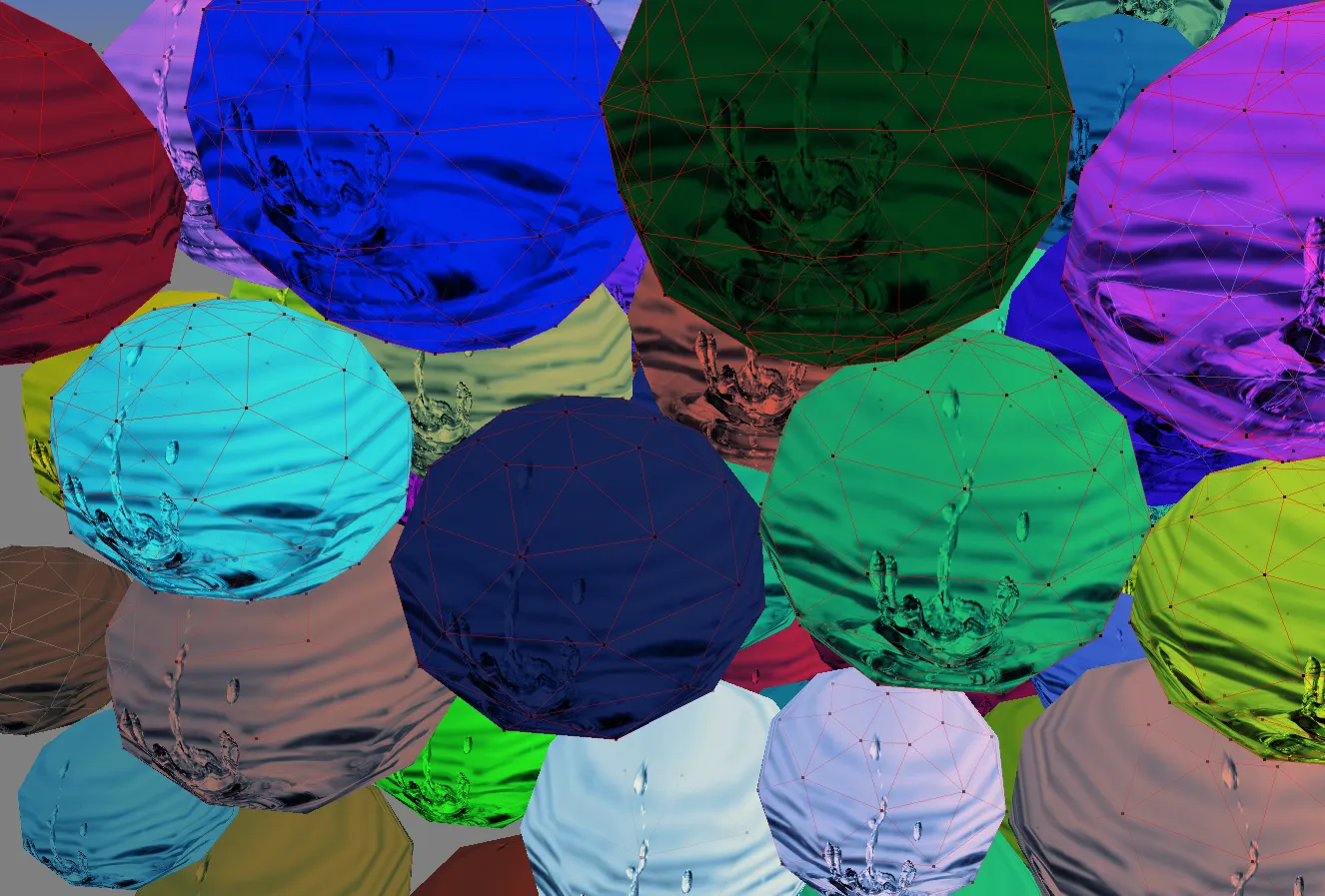
Debug & Visualization Tools
To better understand and debug the simulation, we implemented several visual debugging tools:
- Wireframe rendering for collision volumes
- Visualization of spatial partitioning zones
- Real-time feedback on entity interactions
These tools were essential to:
- Validate collision correctness
- Tune performance
- Identify edge cases and instability
Additional Feature: Water Simulation
At the end of the project, we had enough time to experiment with an additional system: a simple water simulation.
We implemented:
- A flat water surface
- Dynamic interactions such as:
- Raindrop impacts
- Wave propagation
- Interference between waves
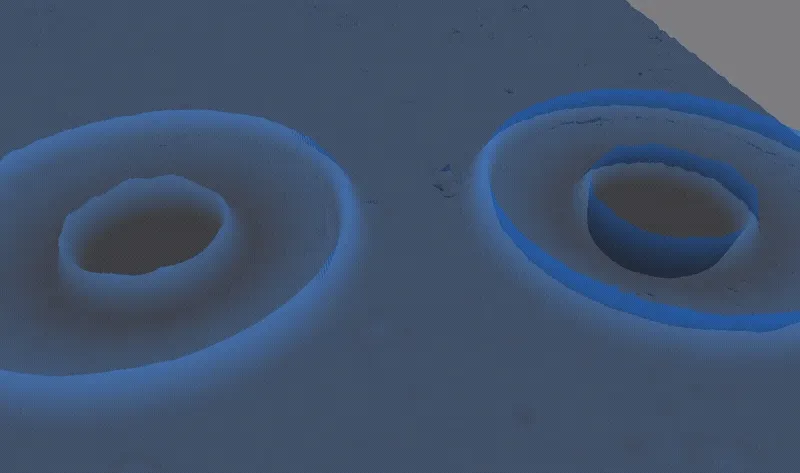
The simulation was also handled on the GPU, allowing:
- Real-time performance
- Smooth and reactive behavior
Notably, we reproduced effects such as:
- The delayed upward splash after a droplet impact
- The interaction between waves that combine and cancel each other
Technical Challenges
Extreme Time Constraint
Building a physics engine in one week required:
- Fast decision-making
- Clear task distribution
- Efficient iteration
Large-Scale Collision Handling
Handling thousands of objects meant:
- Avoiding O(n²) collision checks
- Designing scalable systems from the start
GPU Transition
Moving physics to the GPU introduced challenges such as:
- Data synchronization
- Debugging complexity
- Adapting algorithms to parallel execution models
Conclusion
Physics_Engine was an intense and highly rewarding project focused on performance-oriented system design.
In just one week, we managed to:
- Build a scalable physics engine
- Simulate thousands of interacting entities
- Leverage the GPU for both physics and rendering
- Deliver a stable and visually convincing simulation
This project strengthened my skills in:
- Optimization techniques
- Parallel programming
- Physics simulation fundamentals
- Real-time system design under constraints
It also reinforced an important lesson:
Smart architecture and the right optimizations matter more than raw complexity when working under tight constraints.